Bu konuda yol sanatı ekolünde nasıl bir metot izlendiğine dair detaylıca ve kendi çektiğim resimler ile bazı örnekler üzerinden anlatmaya çalıştım. Yazı önce sistemin ne olduğunu ve aşamalarını kabaca özetliyor. Ardından üç tane örnek üzerinde virajlara dair ön bilgileri almayı açıklıyor. bu yazı bir serinin ilk bölümü. Limit noktası takibi, virajlar arası düzlüklerde ivmelenme, konumlanma ilkeleri ve örnekleri gibi konulara ise devam yazısında değineceğim.
Motosiklet sürerken virajlı parkurlar başladığında eğer keskin bir virajı ne zaman önümüzde bulacağımızı bilmiyorsak içimizi inceden bir tedirginlik kaplar. Hızımız düşer. Olması gerekenden çok fazla düşer. Aslında virajlı parkurlarda virajları değerlendirmenin iki önemli boyutu var: Birincisi limit noktası, diğeri araziden faydalanma. Limit noktasına daha sonra değinelim. Şimdiki konumuz henüz görmediğimiz virajların keskinlikleri hakkında arazi şekillerinden faydalanarak önceden bilgi almak.
Bu sitede yer verdiğim sürüş sistemi, yol sanatı ekolünden eğitim yerlerinin yol eğitimlerinde verdikleri ve Motosiklet Yol Sanatı kitabında anlatılan motosiklet kontrol sistemidir. Dolayısıyla benim sistem dediğim şey, bu kitapta anlatılan sürüş metodu. Bilgi, sistemin ilk aşamasını oluşturuyor ancak sistem içinde ilerledikçe bilgi hep alınmaya devam ediliyor. Yani bilgi aşaması her aşamayı kapsayan bir üst şemsiye. Bilgi değişirse sistemin en başına dönüp yeniden uygulamaya başlıyoruz. Bilgi nasıl değişiyor? Viraj beklediğimizden daha fazla keskinleşmeye başlıyorsa, virajın içinde karşıdan araba geliyorsa, gelen araba bizim şeridimize taşmışsa, tali yoldan bir araba görünmüşse, daha önce girişini göremediğimiz tali yolda görüş açılıp da orada kimsenin olmadığını görmüşsek bunlar hep bilginin değişmesi durumlarıdır. Bu durumlarda sistemin aşamalarını başa dönüp yeniden uygulamaya başlarız. Bu nedenle bilgi aşaması hem tüm sistemi kapsar hem de sisteme esnek bir yapı kazandırır. Yani sistemli sürüş her zaman şeridin burasından git veya her zaman gazı şöyle aç veya viraja her zaman buradan gir biçiminde ilkelerden oluşmaz. Dinamiktir, duruma uyum sağlar. Sisteme dair güzel bir giriş videosuna şuradan ulaşabilirsiniz. Bu sayfa bir kenarda dursun videoyu izleyip gelin isterseniz. Ben beklerim.
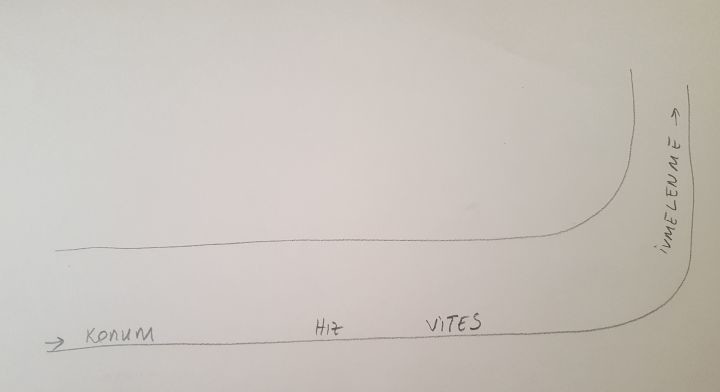
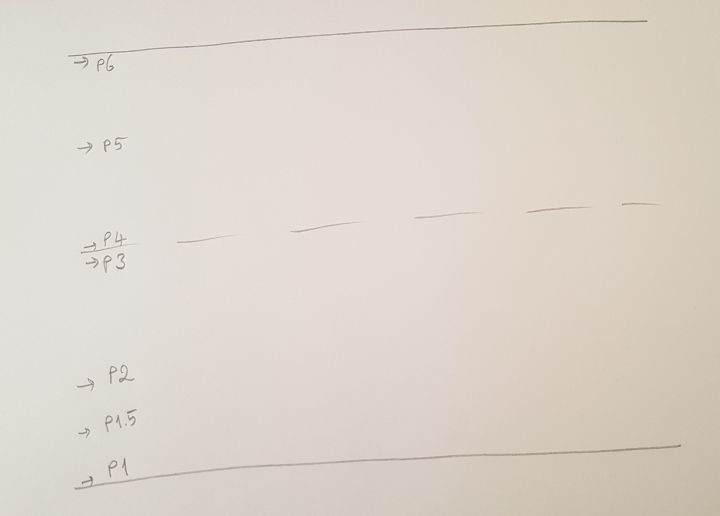
Sistemi daha sonra detaylıca ele alacağım ama kısaca özetleyeyim. Bilgi aşamasından sonra konum, hız ve vites geliyor. Yani bir tehlikeye yaklaşırken önce konumumuzu ayarlıyoruz. Gerekiyorsa değiştiriyoruz, gerekmiyorsa aynen kalıyoruz. Konumdan kastımız şeridin neresinde durduğumuz. Bunu bazı eğitimciler P1, P2, P3 (Pozisyon 1, Pozisyon 2, Pozisyon 3 gibi) şeklinde söylüyorlar. Bence çok güzel bir format. P1 en sağdaki şeridin (gidiş geliş yollarda kendi şeridimizin) en sağı. P2 ortası ve P3 kendi şeridimizin en solu. P4 soldaki şeridin en sağı, P5 ortası, P6 da soldaki şeridin en solu. Konumlanma için buçuklar da kullanılabiliyor söylerken. “Eğer P1’de mıcır varsa P1.5 tercih edilir.” veya “Sol şeritte araç sollarken güvenlik balonu bırakmak amacıyla P6’dan devam edilir. Ancak yola yakın bir bariyer varsa konumumuz P5 veya P5.5 olmalıdır.” gibi.
Sistemli sürüşte konumumuzu ayarladıktan sonra hızımızı ayarlıyoruz. Değiştirmemiz gerekirse değiştiriyoruz. Hızı azaltmamız gerekirse azaltıyoruz. Ondan sonra vites aşaması geliyor. Yavaşlama yolları: Gaz, fren, vites yazısında açıklandığı gibi önce gaz kolunu kullanıp yavaşlıyoruz yetmezse frenleri aynı anca ikisi birden olacak şekilde kullanıyoruz. Bunu yapabilmek için de doğru devirde olmamız gerekiyor yoksa gaz kolunu kapatmak motoru yavaşlatmakta cılız kalır, işe yaramaz. Ayrıca sadece arka frenle yavaşlamaya çalışmak da abestir. İkisini birden kullanıyoruz. (Motoru arka fren yavaşlatır, ön fren durdurur gibi yaygın bir yanılgıya rastladım. Doğru değil. Yavaşlamak için önce gaz kolunu küçük küçük kapatıyoruz. Yani kompresyonla yavaşlıyoruz. Yetmezse frenlerin ikisini birden kullanıp yavaşlamaya devam ediyoruz.) Yavaşlama esnasında vitesle oynamıyoruz. Hızımızı bu viraj için uygun olan hıza kadar indirdikten sonra artık frenleri bırakıyoruz. Bu arada dikkat ederseniz vites düşürmek marifetiyle yavaşlamak diye bir uygulama yok. Şanzımanı elimize almanın bir anlamı da yok zaten vites düşürerek hıza dair bir ince ayar yapmanın yolu yok. Anlamsız.
Hızımızı viraj için uygun hale getirdikten sonra eğer vites düşürmemiz gerekiyorsa, yani hızımızı bir alt vitese geçmeyi gerektirecek kadar düşürmüşsek, vitesi küçültüyoruz. Buraya kadar anlattığım şeylerin hepsi virajdan önce yapılıp bitirilmiş olması gerekiyor. Önce bilgi aldık, virajın keskinliğini anlamaya çalıştık. Bu viraj için uygun konuma geçiyoruz. Sonra uygun hıza geliyoruz. Ardından uygun vitese geçiyoruz. Vitese geçtikten sonra debriyajı bıraktığımızda motor hala viraja başlamamış olmalı. Yani bu aşamaların tamamını virajdan önce bitirmiş olmalıyız. Bu aşamaları birbirine harmanlayıp karmakarışık bir iş haline getirmiyoruz.
Bu aşamaları bu şekilde, virajdan (herhangi bir tehlikeden) önce ve sırasıyla yaptığımız zaman iki parmakla fren kullanmaya, parmakları fren maneti üzerinde tutmaya veya ara gazla vites düşürmeye, ara gaz verirken motor akıp gitmesin diye ön freni iki parmakla sıkmaya veya kaydırmalı debriyajı olan motorlara ihtiyaç duymuyoruz.
Sistemin vites aşamasını da bitirdikten, yani vitesi dürüşüp debriyajı tamamen bıraktıktan, sonra artık önümüzdeki tehlike (viraj) başlıyor. Virajın açılmasıyla beraber artık ivmelenmeye başlıyoruz. Artık virajdan sonra önümüzde yeni bir senaryo var. Bir sonraki viraj mı olur, tepe üstü mü olur, tali yoldan gelen araba mı olur, art arda iki viraj mı olur, ona göre yeni sürüş planı yapıp aynı aşamaları bilgi, konum-hız-vites aşamalarını tekrarlıyoruz.
***
Bu yazıda virajlı parkurlarda ihtiyaç duyacağımız bir bilgi alma yöntemine örnekler üzerinden değineceğim. Bilgiyi alabilmek için öncelikle ileriye bakıyor olmamız gerekecek. İleriye bakmak için önce kafayı yerden kaldırmak lazım. Ön tekerin önüne doğru yakına alçağa bakmak veya gösterge paneline bakmak yok. Hep ileriye bakacağız. Geniş bir tarama ile etrafımızda olanlardan haberdar olacağız. Viraja kaçla girdiğimizi bilmeye ihtiyacımız yok. Hızımızın kaç olduğunu sayısal olarak doğru tahmin edebilmeye ihtiyacımız yok. Limit noktası ve doğru hız kavramları sonraki yazılarda gelecek. İleriye bakmak denince insanlar düz bir doğrultuda ileriye uzağa bakmak gibi düşünüyor fakat sağa doğru bir iniş firketesine yaklaşıyorsak, yolun ilerisine bakmak, kafamızı iyice sağa çevirip aşağıya doğru bakmak anlamına geliyor. Sağa doğru 90 derecelik bir viraj ve sonrasındaki sol viraj görünüyorsa ileriden bilgi almak için ileriye bakmak dediğimiz şey ise 90 derece sağa ve yukarıya bakmak anlamına geliyor. Tekrar ediyorum, göstergede sana lazım olan bir şey yok. O kadar çok işin var ki zaten göstergeye bakmaya vaktin yok. Kafamızı kaldırdığımıza ve ileriye bakmaya başladığımıza göre artık örnekleri incelemeye başlayabiliriz. Resimleri, üzerine tıklayarak büyütebilirsiniz.
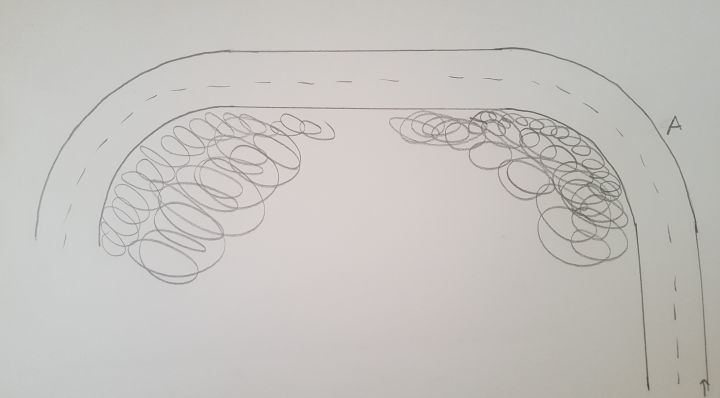
Şimdi hocam fotoğrafın çekildiği düzlük başlar başlamaz artık bu görüntüyü analiz etmeye yani sistemin bilgi aşamasını kullanmaya başlıyoruz. Eğer bakışımız yakına ve aşağıya doğruysa, bu işleri yapmak mümkün değil. Yani motorumuzla bu yolda ilerlerken fotoğrafın çekildiği noktaya geldiğimizde, durmakta olan birinin bu manzarayı görebildiği kadar görebiliyor olmamız lazım.
Bu noktada yolun çizgileri sola doğru gösteriyor. Yani ilk viraj sola doğru. Ancak solumuzda uzanan yükselti virajın oraya doğru devam etmeyeceğini bize anlatıyor. Solumuzdaki yükseltinin ileriye olan devamını gördüğümüze göre yol onun önünde o çizgiyle devam edecek. Yani ikinci viraj sağa doğru. Yükseltinin en ileride bittiği yeri, ucunu görüyoruz ya, işte orada da yolun hava uçacağı veya tarlaların içine doğru ineceği yok; illa ki o yükseltinin ucunun etrafını sola doğru dönecek. Yani üçüncü viraj da sola doğru. Bakın bu fotoğrafın çekildiği noktadayken artık bu üç virajı da gördük ilk ikisinin ne kadar keskin olabileceğine dair yamacın çizgisinden bir fikir aldık. Artık sürüş planımızı o en sondaki sola viraja giriş noktasına kadar yapıyoruz. Eğer bu noktada hala sadece ilk virajı planlayabilmişsek çok yakına bakıyoruzdur. Çok yakına bakmanın olası sebeplerini ve çözümlerini bakış sorunları yazısında ele almıştım. Bu fotoğrafın çekildiği noktada, bu saydığım bilgileri alabildiysek ilk sol virajın arkasında beklenmedik bir firkete gelmeyeceğini biliyoruzdur. Dolayısıyla hızımızı firkete dönecek kadar düşürmenin gereği yok.
İlk sol viraja yaklaşırken viraj kendini iyice göstermeye başlıyor.
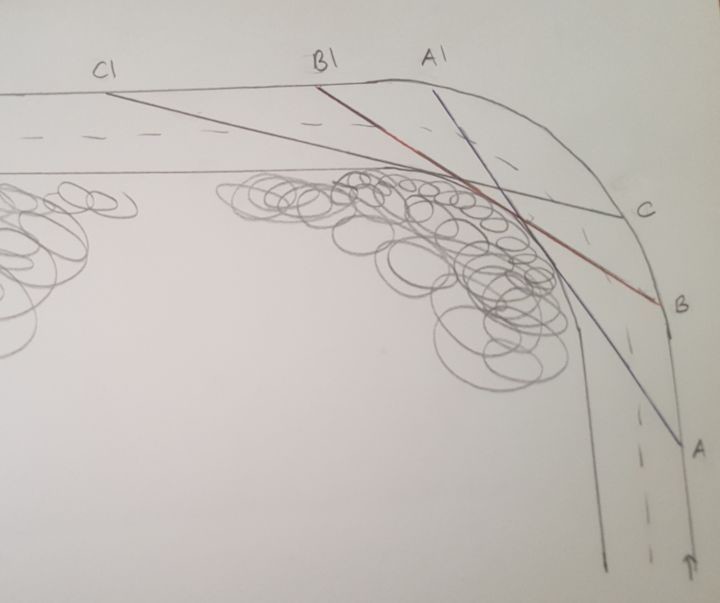
İlk sol viraja girişte yol tutuşla ilgili bir sıkıntı olmadığını görüyoruz. Mıcır yok, oradan buradan gelen araba yok. Dolayısıyla viraja P1’den yaklaşıyoruz. Ardından sağ virajı da görmeye başladık. Planımızda sıkıntı yok. Sağ virajı görür görmez daha ilk viraj bitmeden P3’e doğru yönleniyoruz. Herhangi bir gelen araba, mıcır vesaire gibi bir sıkıntı yok. Dolayısıyla bu sağ virajda da görüş için konumlanabiliriz. Yani P3’e geçiyoruz. Bunu bilinçli bir kontra ile yapıyoruz. Sol gidonu itip motoru olduğundan bir parça daha yatırıyoruz ve motor P3’e yönleniyor. İlk sol virajın bitimiyle sağ virajın başladığı nokta arasında yolun kısacık düz bir kısmı var. O düz kısımda yolun ortasında hayali bir düz çizgi çizin. O çizgi ilk viraja kadar düm düz geriye doğru uzansın. İlk sol virajın çıkışında motoru oturmanız gereken çizgi işte bu P3 çizgisi. Hocam şimdi bu, daha ilk viraj bitmeden diğer viraj göründüğünde ikinci viraj için erkenden konumlanmaya viraj bağlama deniyor.
Sağ viraja P3’ten gireceğiz. Biliyoruz ki sonraki viraj sola. Dolayısıyla P3’ten girdiğimiz sağ virajdan P1’den çıkmayı planladık. Eğer daha sağ viraja yaklaşırken veya içindeyken karşıdan araba gelirse sistemde başa döner gereğini yaparız. Kenara çekiliriz. Veya en sondaki virajın öncesinde yolun sağ tarafı ıslaksa P1 yerine P1.5 veya P2’yi tercih edebiliriz. Ama şimdilik planımız şu: Sağ viraja P3’ten girip çıkışında P1’e bağlanacağız.
Devam edelim.
Evet yol sağa doğru kıvrılmaya ve en sondaki sol virajı göstermeye başladı. Karşıdan gelen yok yolda çukur yok dolayısıyla yukarıdaki resimdeki pozisyonda P3’ten devam ediyorum. Sonraki sahneye geçelim.
Artık az önce girdiğim sağ virajın bitimi ile şimdi gireceğim, son sol virajın girişi arasındaki düzlüğü görebiliyorum. Zeminde bir sıkıntı da olmadığına göre artık motorumu P1’e yönlendirebilirim. Yani sağdaki beyaz çizginin dibine. Yukarıdaki fotoğrafta, sağdaki beyaz çizgiye bak. Bitmekte olan sağ viraj ile başlayacak olan sol viraj arasındaki düzlüğü gördün ya hocam. İşte o düz çizgiyi fotoğrafın çekildiği noktaya doğru uzat. İşte motoru, o doğrultuya oturtacaksın. Sağ viraj dönmekteyken motorun sağa biraz yatık. Dolayısıyla o çizginin doğrultusuna inebilmen için sağa kontra vermen gerekecek. Bu kontra ile motoru P1 çizgisine oturttun, virajı bağladın ve artık en sondaki sol viraj için konum meselesini halletmiş oldun. Hızını ve vitesini ayarlamak için limit noktasını takip etmen gerekecek. Onu sonra konuşuruz. O sondaki sol virajı döndükten sonra artık önünde yeni bir senaryo olacak onu analiz edip sürüş planını yapacaksın ve böyle böyle devam edeceksin.
Bir başka örnek vereyim.
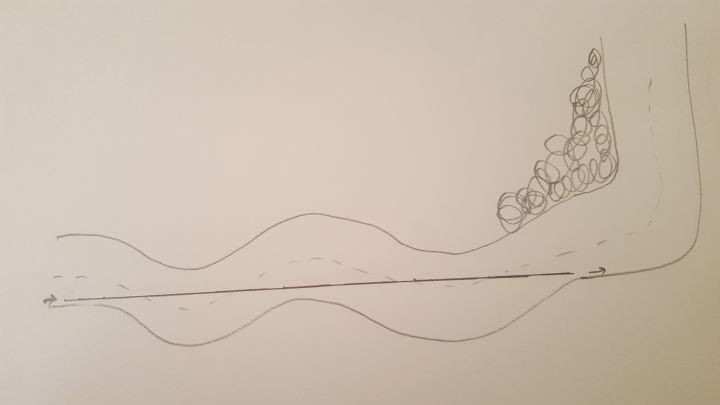
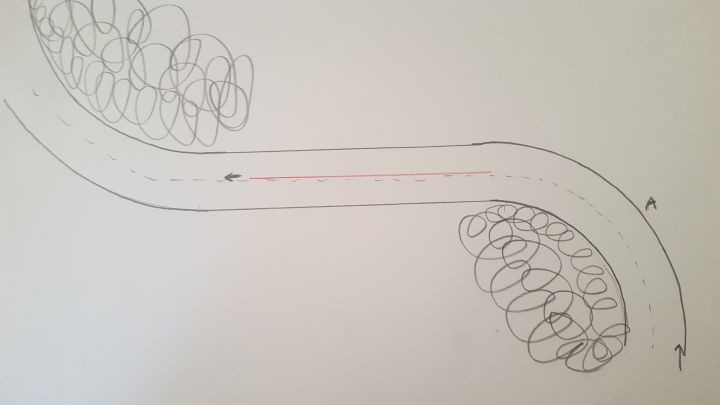
Motorumuzla fotoğrafın çekildiği noktaya geldiğimizde ilk virajın sağa olduğunu görüyoruz. Ardından sol viraj görünüyor. Keskinliğini de yamacın toprak bölümünün uzayışından anlayabiliyorum. Bir firkete değil ama yine de güzel, keskince bir viraj. Gözlerimde sola doğru yolun gittiği yeri takip etmeye devam ediyorum. Yokuşun en sounda yarın etrafından sağa döndüğünü anlayabiliyorum. Bu iki viraj arasında da arazinin şeklinde bir bozukluk var. Yokuşun ortalarına denk gelen o bölümde yol küçük, önemsiz bir viraj yapabilir. Artık planım hazır. Virajları birbirine bağlamaya başlayabilirim. İlk viraja P3’ten yaklaşacağım. Ama muhtemelen asfaltın tamamı bir kaç metre ilerleyince hemen görünecek dolayısıyla en kısa yoldan bu ilk sağ virajı geçebilirim. Sonraki viraj sola olduğuna göre ona P1’den yaklaşmayı planlıyorum. Yol tutuşla ilgili bir sıkıntı görürsem hemen planda bir değişiklik yapacağım. O sol viraja P1’den girip, çıkışında da en sondaki sağa viraja P3’ten girecek şekilde konumlanmak plan yaptım. Ama aradaki önemsiz olduğunu düşündüğüm kıvrım için özel bir şey yapmam gerekirse o göründüğünde yapacağım. Muhtemelen gerekmeyecek. O aradaki önemsiz virajı düz keseceğim ve esas önemli olan en sondaki sağ viraja P3’ten yaklaşacağım.
Bir başka örnek. Burada tepe üstü var. Dolayısıyla buna P1’den yaklaşıyorum.
Tepe noktasının ardında sağa bir firkete olabilir mi? Hayır çünkü yamaç sağımda devam ediyor. Yolun sağa dönmesi bile pek muhtemel değil. Hele sağ firkete hiç olmaz. Peki bu yol tepe noktasının bitiminde sola doğru sert bir viraj yapar mı? Yapmaz çünkü yolun sol tarafını görüyorum: Tarla. Sol tarafta ileride sola doğru az bir eğimle tırmanan bir toprak düzlük görüyorum. Muhtemelen orası yolun devamının kenarı. Bu yol genişçe bir kavisle dağların ilerleyişine paralel olarak sola doğru devam edecek. Dolayısıyla sürüş planımda firkete dönecek kadar hızımı azaltmak yok. P1’den uygun bir hızda yaklaşıp tepe üstünden sonraki manzarayı görmek üzere beklemedeyim.
***
Arazi şekilleri olduğu gibi sıralanmış ağaçlar, evlerin cephesi (evler genelde yola çapraz durmaz, cepheleri yola bakar), telefon ve elektrik direkleri de asfalt görünmüyor olsa bile yolun devamına dair bilgi sağlarlar. Bu bilgileri erkenden alabilirseniz, bakışınız buna müsaade ederse, sürüş planınızı oluşturmakta kullanabilirsiniz. Ancak şartların değişebileceğini, asfalt yüzeyinde başka olumsuzluklar olabileceğini veya aslında arazi şekillerinin sizi yanıltmış olabileceğini hesaba katmalısınız. Dolayısıyla sürüş planınız dimanik olmalı yani değişen koşullara uyum sağlamalı. Sürprizlerle karşılaşırsanız bir B planına geçişinize izin verecek bir hızda olmalısınız.
Bu yazıda virajlı bir parkurda viraj keskinliğini anlamayı konu ettim ama sistemin bilgi aşaması bozuk zemindeki sürüşlerde de kötü hava koşullarında da şehir içi kalabalık ortamdaki sürüşlerde de aynen kullanılmaya devam ediyor. Yani sistem sadece bomboş, virajlı dağ yollarında kullanılan bir sürüş modeli değil. Her türlü yol koşulu için geçerli. Bir tepe noktasına, içi görünmeyen bir battı-çıktıya, bir hız kesme tümseğine, kontrolsüz kavşağa yaklaşırken de bilgi, konum, hız, vites sıralamasını gözeteceğiz. Bu tehlikelerin öncesinde bu işler bitmiş olacak. Tehlikeyi geçer geçmez de ivmelenme aşaması ile uzaklaşacağız.
Burada ele alınan konularla ilgili, daha iyi bilgi almak için tavsiye ettiğim kitapların ilgili bölümleri okuyabilirsiniz.
Dikkat ederseniz virajın içinde nasıl ilerleneceğini, neler yapılacağını es geçtim. O konuları, bakış, limit noktası ve doğru hız kavramlarını devam yazılarında ele alacağım.











 MT Site yönetimi uyarı mesajı.
MT Site yönetimi uyarı mesajı. Forum admin ve yöneticileri kurallara uymayan mesajlari degistirme ve silme hakkina sahiplerdir.
Forum admin ve yöneticileri kurallara uymayan mesajlari degistirme ve silme hakkina sahiplerdir.